Vigilance Estimation Using a Wearable EOG Device in Real Driving Environment
Abstract
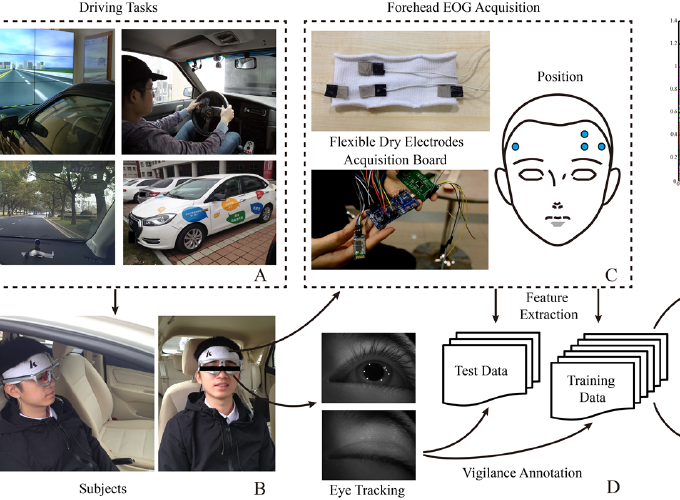
Vigilance decrement in driving tasks has been reported to be a major factor in fatal accidents and could severely endanger public transportation safety. However, efficient approaches for estimating vigilance in real driving environment are still lacking. In this paper, we propose a novel approach for implementing continuous vigilance estimation using forehead electrooculograms (EOGs) acquired by wearable dry electrodes in both simulated and real driving environments. To improve the feasibility of this approach for real-world applications, a forehead EOG-based electrode placement with only four electrodes is designed. Flexible dry electrodes and an acquisition board are integrated as a wearable device for recording EOGs. Twenty and ten subjects participated in the simulated and real-world driving environment experiments, respectively. Accurate eye movement parameters from eye-tracking glasses are extracted to calculate the PERCLOS index for vigilance annotation. This is because the vigilance state is a temporally dynamic process, and a continuous conditional random field and a continuous conditional neural field are introduced to construct more accurate vigilance estimation models. To evaluate the efficiency of our system, systematic experiments are performed in real scenarios under various illumination and weather conditions following laboratory simulations as preliminary studies. The experimental results demonstrate that the wearable dry electrode prototype, which has a relatively comfortable forehead setup, can efficiently capture vigilance dynamics. The best mean correlation coefficients achieved by our proposed approach are 71.18% and 66.20% in laboratory simulations and real-world driving environments, respectively. The cross-environment experiments are performed to evaluate the simulated-to-real generalization and a best mean correlation coefficient of 53.96% is achieved.